The old PEC function (until V1.21)
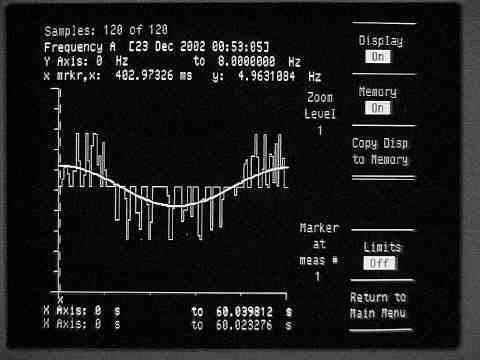
The new PEC function (from V1.22)
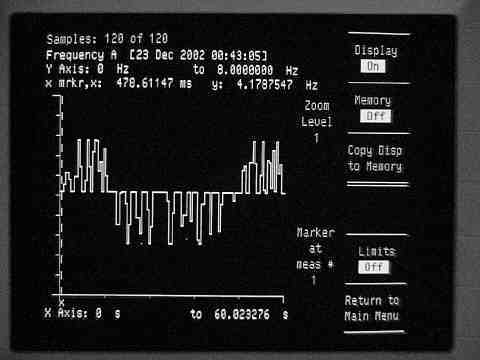
Bei Montierungen mit einer sehr kleinen Untersetzung (z.B. Gemini G40/41) hatte die Tabelle nur wenig Einträge, was die erreichte Verbesserung durch PEC begrenzte.
Das
Bild zeigt die Frequenz (Geschwindigkeit) des Rekt.-Motors während
der Lernphase über der Zeit.
Die
Y-Achse geht von 0 Hz bis 8 Hz, die mittlere Nachführfrequenz ist
in diesem Beispiel 4.18 Hz.
Die
X-Achse geht von 0 bis 60 Sekunden, das entspricht in diesem Beispiel genau
einer Periode des Schneckenfehlers.
Theoretisch
dürften in dem Diagramm nur drei verschiedene Frequenzen sichtbar
sein: 4.18 Hz wenn keine Taste gedrückt wurde, 0.5 x 4.18 Hz wenn
die linke Taste gedrückt wurde, und 1.5 x 4.18 Hz wenn die rechte
Taste gedrückt wurde (weil "Stufe1" auf 0.5x eingestellt ist).
Dass
tatsächlich auch andere Frequenzen gemessen wurden hat eine rein messtechnische
Ursache: Wenn sich die Freqenz während der Torzeit des Frequenzzählers
ändert, dann wird eine gemittelte Frequenz dargestellt.
Die Messungen wurden mit einem HP5371A Frequency and Time Interval Analyzer durchgeführt.
Von den so ermittelten Daten wird rechnerisch die mittlere Nachführgeschwindigkeit abgezogen, so dass der Nachführ-Fehler übrigbleibt. Jetzt wird mittles Fourier-Analyse die Amplitude und Phasenlage der Grundwelle des Schneckenfehlers berechnet.
Diese Parameter werden im NV-Ram dauerhaft gespeichert.
Die errechnete Peak-to-Peak Amplitude kann im Display angezeigt werden, damit man sehen kann wie gross der Schneckenfehler ist.
Die
Information über die Grundwelle des Schneckenfehlers liegt jetzt im
"Motorposition über Zeit" Koordinatensystem vor.
Um
den Fehler ständig korrigieren zu können, ist eine Transformation
in das "Motorgechwindigkeit über Schneckendrehwinkel" Koordinatensystem
notwendig.
Diese
Transformation ist auf den ersten Blick trivial, wenn man sich näher
damit beschäftigt aber ziemlich kompliziert. Ich habe mich lange mit
diesem Problem beschäftigt, und wie ich glaube eine gute Lösung
gefunden.
Zum
Vergleich sehen Sie oben den zeitlichen Verlauf der Motorfrequenz mit der
neuen PEC-Funktion.
Während
der Lernphase kommen wie bisher nur drei verschiedene Frequenzen vor, aber
wenn die PEC-Funktion dann selbstständig Korrekturen ausführt,
dann ändert sich die Frequenz kontinuierlich entsprechend einer Sinuskurve.
Ist doch schön, oder?
Der oben dargestellte Schneckenfehler ist übrigens absichtlich sehr gross, nämlich 47 Bogensekunden Peak-to-Peak. Bei einer realen Montierung mit realistischem Schneckenfehler wäre die Frequenzänderung so klein, dass sie im Frequenz-über-Zeit Diagramm kaum auffallen würde.